In a landmark development for the field of robotics, Alibaba’s Qwen team officially unveiled the Qwen-Robot Suite this Tuesday, marking what industry analysts are calling an "Android moment" for physical intelligence. By introducing a trio of foundation models—Qwen-RobotNav, Qwen-RobotManip, and Qwen-RobotWorld—Alibaba has proposed a unified, full-stack software architecture designed to act as the cognitive engine for the next generation of robotic hardware.
Unlike traditional robotics software, which often relies on rigid, task-specific programming, Alibaba’s new suite leverages generative AI to bridge the gap between abstract instruction and physical execution. This release signals a strategic pivot for the Chinese tech giant, which remains the only firm in the region to maintain a seamless, vertical integration spanning silicon chips, cloud infrastructure, foundational models, and consumer-facing applications. For Alibaba, robotics is the final, physical frontier of its AI ambitions.
A New Taxonomy of Robotics: The Three Pillars
The Qwen-Robot Suite is not a singular robot, but rather a "brain" that can be transplanted into diverse robotic bodies. The suite is divided into three distinct yet interoperable components:
1. Qwen-RobotNav: The Gateway to Mobility
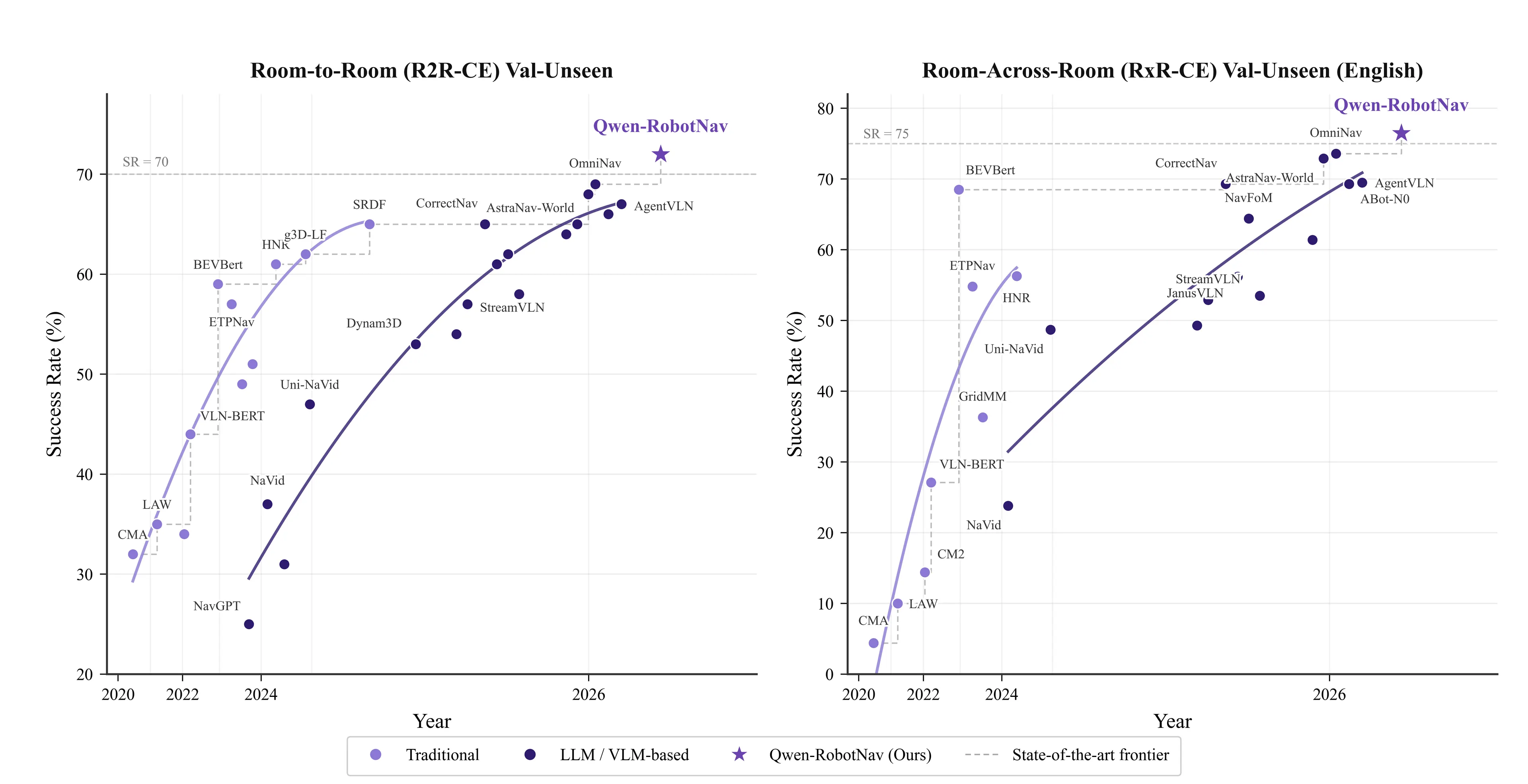
Navigation has long been a siloed challenge in robotics, with different models often hardcoded for specific environments or tasks. Qwen-RobotNav breaks this pattern by unifying five critical navigation tasks—instruction following, point-goal navigation, object search, target tracking, and autonomous driving—into a single, flexible model.
Its key innovation is a parameterized interface that allows a robot’s central planner to reconfigure strategies in real-time. By adjusting variables like token budgets, temporal decay, and per-camera weights mid-episode, the model adapts to the specific visual memory requirements of its surroundings. Trained on a massive dataset of 15.6 million samples, it has achieved a 76.5% success rate on the VLN-CE RxR benchmark and a 90% tracking efficiency on EVT-Bench, demonstrating superior consistency in dynamic, real-world environments.
2. Qwen-RobotManip: Solving the Action-Space Bottleneck
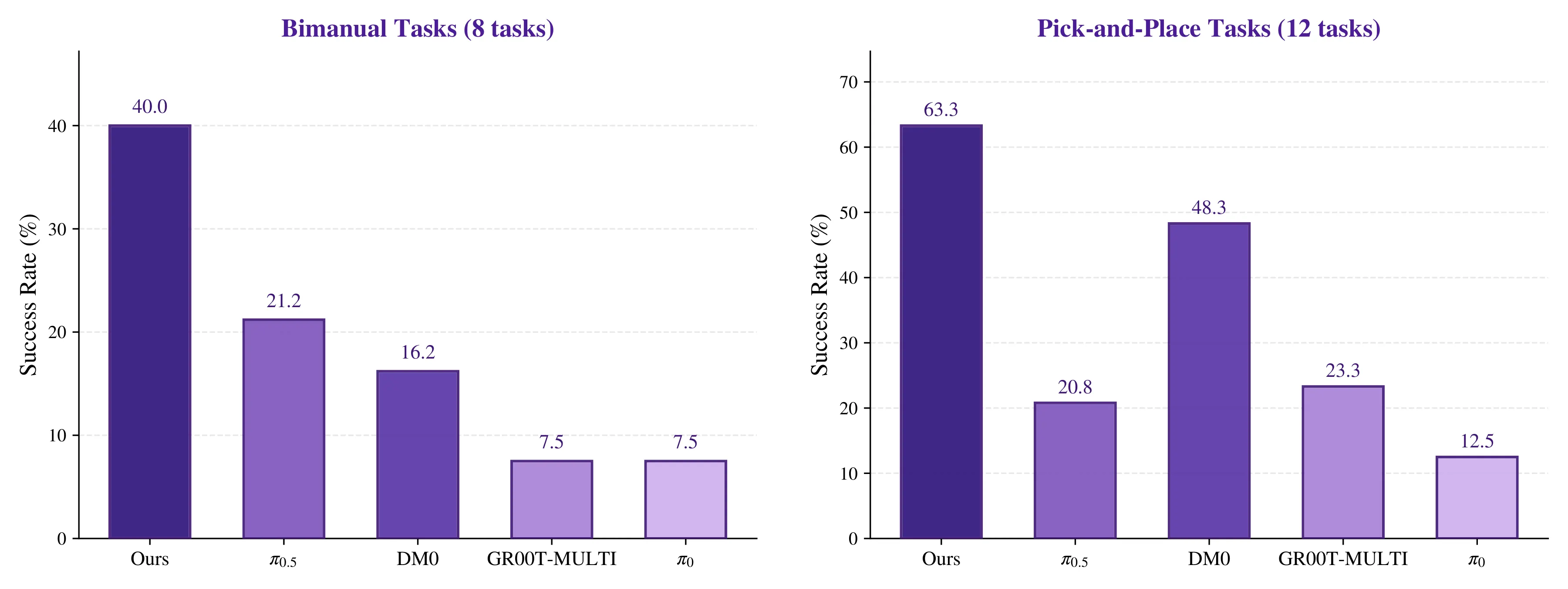
Manipulation remains one of the most stubborn hurdles in robotics due to the lack of standardization across hardware. A Franka arm, for instance, operates through complex joint angles, while a bimanual ALOHA robot focuses on end-effector poses. These "action spaces" are often mutually incompatible.
Qwen-RobotManip solves this by creating a cross-morphology bridge. By synthesizing 38,100 hours of training data from open-source repositories and human-centric video, the model enables a unified language for robotic movement. It currently leads the RoboChallenge Table30-v1 benchmark, outperforming existing methodologies by a significant 20% margin. By focusing on alignment-first training, Alibaba has effectively decoupled the "intelligence" of the task from the mechanical constraints of the machine.
3. Qwen-RobotWorld: The Physics-Aware World Model
The most ambitious component of the suite, Qwen-RobotWorld, treats natural language as a universal action interface. It is a language-conditioned video world model that understands the consequences of physical actions. While a standard Large Language Model (LLM) can tell you that a glass will break if dropped, Qwen-RobotWorld is designed to predict the physics of the event—the shatter pattern, the fluid dynamics of the liquid inside, and the secondary collisions that follow.
The underlying "Embodied World Knowledge" corpus comprises 8.6 million video-text pairs, totaling 200 million frames. This data covers a massive breadth of scenarios, from autonomous driving simulations to complex bimanual manipulation. It has set new performance records on both EWMBench and DreamGen Bench, proving that it can simulate environments that strictly adhere to Newton’s laws, mass conservation, and gravity.
The Chronology of Development
- Early 2024: Alibaba’s Qwen team initiates the "Embodied Intelligence" initiative, focusing on data synthesis to overcome the "data drought" in robotic research.
- Q3 2024: Initial development of the cross-morphology training protocols begins, targeting the integration of various robot arm types.
- Q1 2025: Internal testing of the unified navigation interface (Qwen-RobotNav) shows promise in reducing the "hardcoding" of navigation strategies.
- May 2026: The final integration of the three models is completed, and the suite begins internal testing across heterogeneous hardware, including AgileX and Unitree platforms.
- June 16, 2026: Official public announcement of the Qwen-Robot Suite.
Implications for the Global Robotics Race
The introduction of the Qwen-Robot Suite creates a significant ripple effect in the global AI landscape. While Western counterparts such as Google DeepMind, Nvidia, and Physical Intelligence are also aggressively pursuing embodied AI, most remain focused on specific niches—either navigation or manipulation. Alibaba’s "full stack" approach—leveraging its own cloud, chips, and software—gives it a distinct advantage in terms of optimization and scalability.
Furthermore, by opting for an open-source foundation, Alibaba is positioning itself to capture the developer ecosystem. By allowing researchers and manufacturers to use the suite on hardware from companies like Franka, Universal Robots, and Unitree, they are effectively lowering the barrier to entry for high-level robotic intelligence.
However, the industry must remain grounded. Experts warn that the gap between a controlled laboratory demo and a robot capable of performing household chores is vast. The "long tail" of edge cases—sensor noise, mechanical wear and tear, and unpredictable real-world environments—continues to humble even the most sophisticated systems.
A Shift from "Chat" to "Action"
A common misconception is that these models are simply LLMs adapted for robots. In reality, they represent a fundamental departure from token prediction. A standard LLM operates in the realm of probability and syntax. Qwen-RobotWorld operates in the realm of causality and physics.
When an LLM provides an answer, it is validated by human perception. When Qwen-RobotWorld provides an action, it is validated by the physical integrity of the environment. This distinction is critical: the model doesn’t just predict what a robot might do; it predicts what the consequences of that action will be in the physical world.
The Road Ahead
Alibaba has not yet disclosed specific pricing, deployment timelines, or the identities of the partners in their pilot programs. However, the release confirms that the company is betting heavily on a future where AI is not confined to servers and screens, but is instead embodied in machines that navigate our streets and manipulate our physical world.
As the industry moves forward, the success of the Qwen-Robot Suite will likely be measured not by its performance on benchmarks, but by its ability to transition from the laboratory into the volatile, messy, and unpredictable reality of everyday life. For now, Alibaba has provided the blueprint for a new generation of robotics, one where the "operating system" of the robot is finally as flexible and intelligent as the software that drives the rest of our digital lives.
The era of embodied AI has arrived; it is no longer just about generating text—it is about navigating the world.